- Complex fluids and materials
- Active condensed matter
- Liquid crystal physics
- Nonlinear elasticity
- Fluid-structure interaction
- Soft robotics
- Biological flows and biomedicine
- High performance computing
1.
Soft colloids
Microscopic soft particles are commonly found in nature and engineeringapplications. Examples include red blood cells, fluid vesicles and microgel particles. When placed in a liquid, soft particles can readily undergo large deformations to accommodate the hydrodynamic forces, which in turn has a significant impact on the macroscopic rheological properties of the mixture.
Microscopic soft particles are commonly found in nature and engineeringapplications. Examples include red blood cells, fluid vesicles and microgel particles. When placed in a liquid, soft particles can readily undergo large deformations to accommodate the hydrodynamic forces, which in turn has a significant impact on the macroscopic rheological properties of the mixture.
* Shear
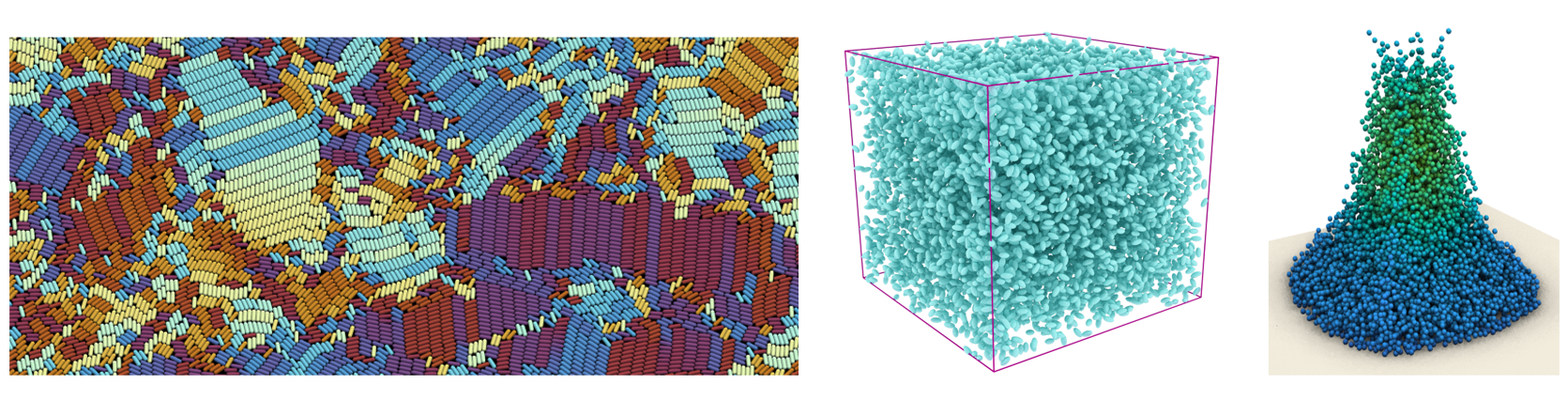
rheology We consider a suspension of
elastic solid particles in a viscous liquid. The particles are assumed
to be neo-Hookean and
can undergo finite deformation. When placed in a shear flow, three
types of motion - steady-state,
trembling and tumbling - are found. The rheological properties
generally exhibit shear-thinning
behavior, and can even show negative intrinsic viscosity for
sufficiently soft particles.
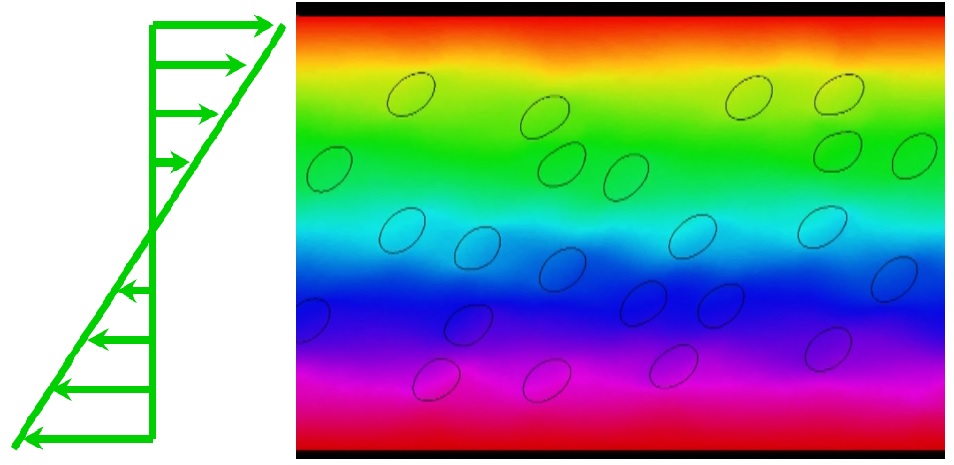
Fig 1: Suspension of deformable particles under simple shear
(
Gao et al. 2011).
* Critical behaviors of polymer dynamics
We examine the underlying physical mechanisms of microdynamics of polymers when subjected to viscous fluid forces.
For example, we study the phenomenon of the ‘coil-stretch’ (C-S) transition, wherein a long-chain polymer
initially in a coiled state undergoes a sudden configuration change to become fully
stretched under steady elongational flows. We introduce a continuum model in this study to investigate the C-S transition in a
constant uniaxial elongational flow. Our approach involves approximating the unfolding
process of the polymer chain as an axisymmetric deformation of an elastic particle.
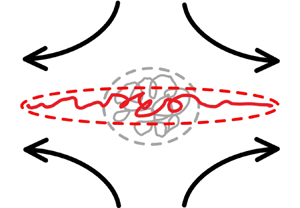
Fig 2: Coil-stretch transition of long-chain polymer (
Gao 2024
).
* Electrohydrodynamics We study the dynamics
of a long elastic particle
undergoing electrophoresis. The particle is elliptical in shape and is
initially aligned with its
major axis perpendicular to the direction of a uniformly applied
electric field. The particle tends
to curl up at its ends and arches in the middle. After a transient
deformation, the particle migrates
at Helmholtz-Smoluchowski velocity.
Fig 3: Electrophoresis of soft ellipsoidal particle (
T. Swaminathan et al. 2010
).
2. Active condensed matter
As a new branch of complex fluids, active matter is composed of self-driven constitutes with emergence of nonequilibrium physics. Despite the difference in composition, all these active systems orchestrate cooperative actions across various length and time scales, accompanying energy conversion from one form (e.g., chemical fuel) to another (e.g., mechanical work). Typical systems include cytoskeletal networks, synthetic microswimmers, bacterial suspensions, etc.
As a new branch of complex fluids, active matter is composed of self-driven constitutes with emergence of nonequilibrium physics. Despite the difference in composition, all these active systems orchestrate cooperative actions across various length and time scales, accompanying energy conversion from one form (e.g., chemical fuel) to another (e.g., mechanical work). Typical systems include cytoskeletal networks, synthetic microswimmers, bacterial suspensions, etc.
* Bacteria and algae
Active suspensions of swimming microorganisms, such as bacteria or algae, can exhibit fascinating collective behaviors that feature
large-scale coherent structures, enhanced mixing, ordering transition, and anomalous diffusion. Even in the limit of vanishing Reynolds
numbers, densely packed self-driven or swimming micro-particles effectively exert stresses upon the ambient liquid to act as a coupling
medium for the generation of active flows via instability concatenations to amplify the disturbances due to particle motions and local
(e.g., steric) interactions. We build a computation model, including the high-fidelity particle simulator and bottom-up continuum models,
to study the non-equilibrium physics of suspensions of rear- and front-actuated microswimmers, or respectively the so-called “pusher”
and “puller” particles. .
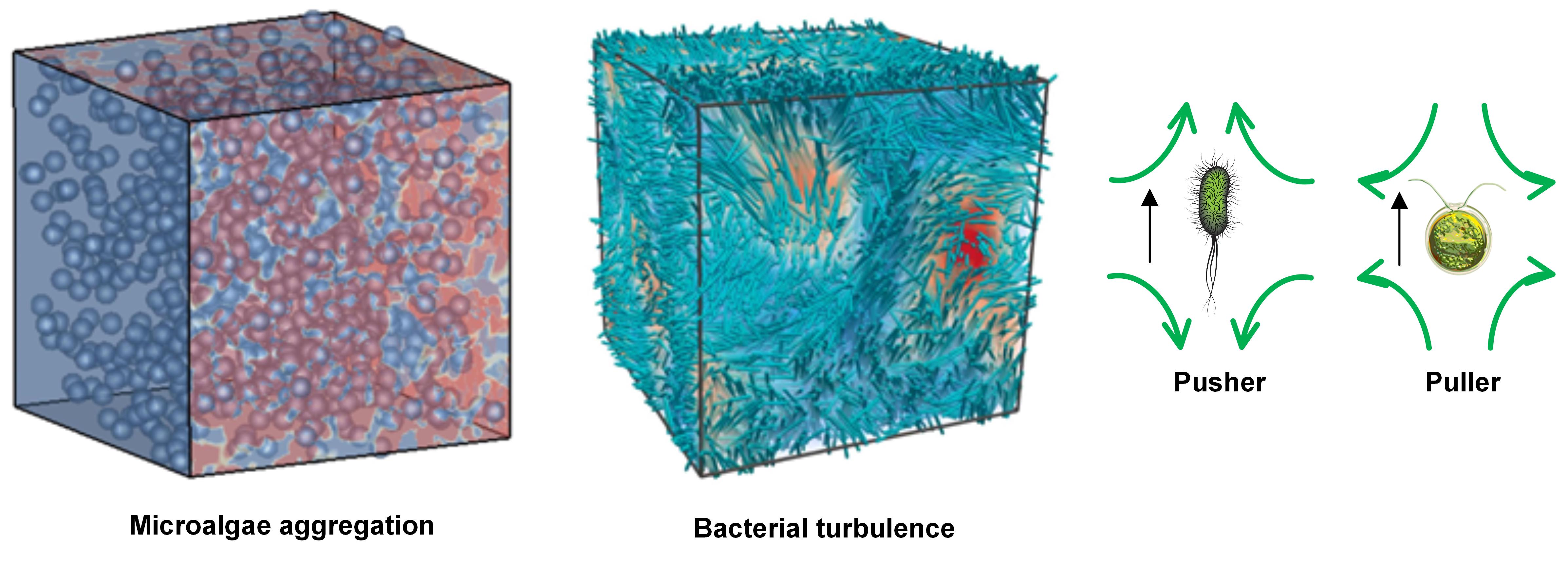
Fig 4: Direct particle simulations for spherical pullers (e.g., microalgae, (
Lin and Gao 2019
) and rod-like pushers (e.g., E. Coli).
* Active cellular matter
Microtubules and
motor-proteins are the building blocks of
self-organized subcellular structures such as the mitotic spindle and
the centrosomal microtubule array. They are ingredients in new
"bioactive" liquid-crystalline fluids that are powered by ATP, and
driven out of equilibrium by motor-protein activity to display
complex flows and defect dynamics. We develop a multiscale
theory for such systems. Brownian dynamics simulations of polar
microtubule ensembles, driven by active crosslinks, are used to
study microscopic organization and the stresses created by
microtubule interactions. This identifies two polar-specific sources
of active destabilizing stress: polarity-sorting and crosslink
relaxation. We develop a Doi-Onsager theory that captures polarity
sorting, and the hydrodynamic flows generated by polar-specific
active stresses. In simulating experiments of active flows on
immersed surfaces, the model exhibits turbulent dynamics and
continuous generation and annihilation of disclination defects.
Analysis shows that the dynamics follows from two linear
instabilities, and gives characteristic length- and time-scales.
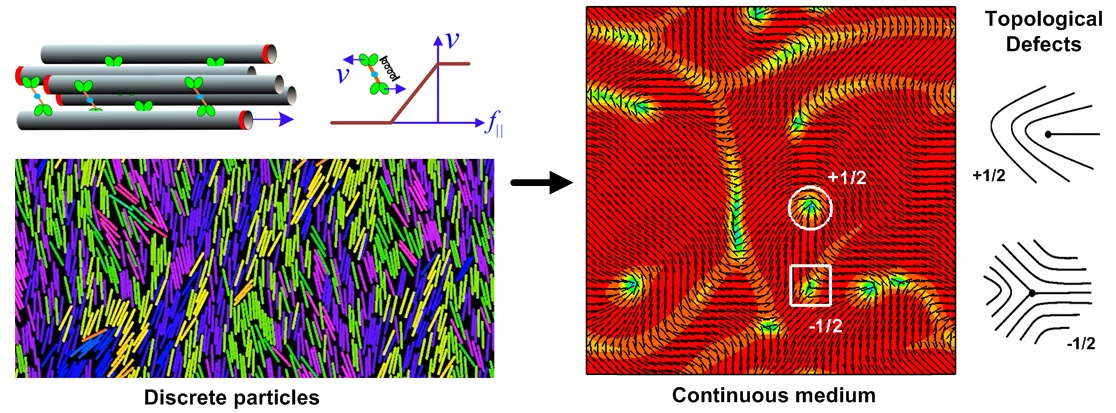
Fig 5: Multiscale analysis of motor-connected MT assemblies with hydrodynamics (
Gao et al. 2015
).
* Geometric control and manipulation
To effectively control the collective dynamics in various internally-driven systems, it is critical to manipulate the emergent
coherent structures. One way of doing this is to tune the suspension concentration and the amount of chemical fuels. Alternatively,
we can take advantage of the particle interactions, either individually or collectively, with obstacles and geometric boundaries to
manipulate the system more directly. By trapping active suspensions (such as Pusher swimmers or Quincke rollers) within the straight
and curved boundaries, stable flow patterns, such as unidirectional circulations, traveling waves, density shocks, and rotating vortices,
have already been constructed. More interestingly, active nematic flows under soft confinement by surface tension are able to generate
internal flows to break symmetry and drive the whole-body movement.
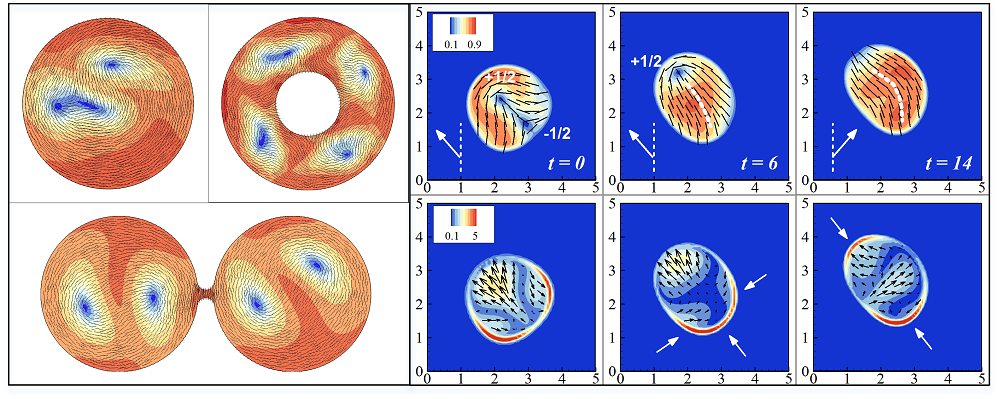
Fig 6: Generation of topological defects under the rigid (
Chen et al. 2018
) and soft (
Gao and Li 2017
) confinement.
3.
Soft robotics
Soft robotics is an emerging area that draws extensive interests from core areas in materials science and engineering, human health and medicine, applied mathematics, and biomechanics. It stimulates new structural design, and has advantages of simple control, light-weight, miniaturization, and affordable rapid fabrication. Compared to the conventional robots that are often made of rigid parts, the soft robots that are made from deformable materials can undergo flexible deformation under actuation, which essentially permits infinite degrees of freedom to facilitate complicated operations.
Soft robotics is an emerging area that draws extensive interests from core areas in materials science and engineering, human health and medicine, applied mathematics, and biomechanics. It stimulates new structural design, and has advantages of simple control, light-weight, miniaturization, and affordable rapid fabrication. Compared to the conventional robots that are often made of rigid parts, the soft robots that are made from deformable materials can undergo flexible deformation under actuation, which essentially permits infinite degrees of freedom to facilitate complicated operations.
* Inertial swimmer
Designing soft swimming robots that actively deform in fluids is challenging. Fast swimming requires significant momentum exchange
between the robot and fluid to overcome viscous drag, demanding rapid, stable, and reversible deformations. Efficient locomotion
also depends on specific swimming gaits that exploit thrust from drag and wake effects—especially important at low or moderate Reynolds
numbers where viscosity dominates. Understanding these dynamics requires jointly analyzing robot geometry, material properties,
actuation strategies, and fluid interactions. Lightweight structures can also experience instabilities in fluid, complicating control.
Although many soft robots have been built and tested, fully understanding their propulsion still requires combining experiments with
accurate modeling and simulation.
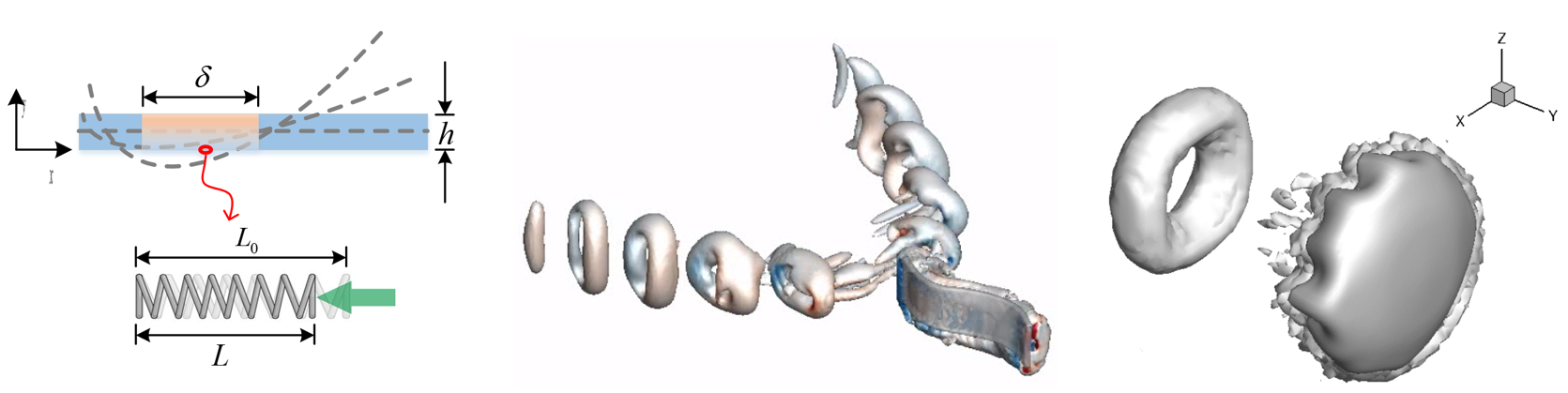
Fig 7: Bioinspired design for soft swimming robots (fish and jellyfish,
Lin et al. 2019
) powered by active strain.
* Non-inertial swimmer and microfluidics
Many organisms live in microfluidic environments, either biological or synthetic, where
the fluid inertia is negligible. In the so-called Stokes (or creeping) flows, Purcell’s
scallop theorem explains that performing time-reversible motions cannot generate
directional swimming or locomotion owing to kinematic reversibility. We design a computational framework for
studying the undulatory motion of a finite-length biomedical robots, i.e., microrobots, in a solution of liquid
crystal polymers, a class of rigid, rodlike aromatic polymers that have much
larger sizes and higher aspect ratios than small molecules (e.g. para-azoxyanisole). Our numerical and theoretical studies suggests the
undulatory swimmers are in favor of aligning with the background nematic polymer structures.
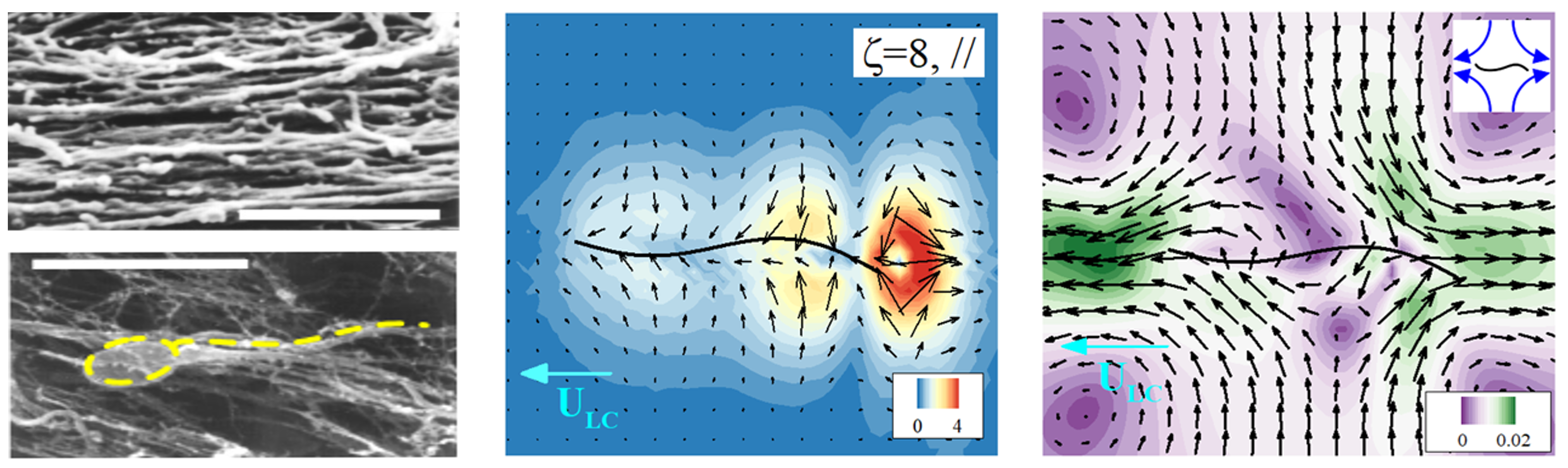
Fig 8: Undulatory micro soft swimmers like spermatozoa prefer to align with the background polymer structures while navigating in anisotropic complex fluids
(
Lin et al. 2022
).
4.
Cardiac mechanics and patient specific model
The heart is a highly complex living structure whose primary function is to cyclically contract in order to generate a pressure gradient to perfuse all body organs including itself. To do so, however, the heart behaves an integrated system where all components of the operation, such as excitation contraction coupling, are tightly orchestrated. Heart failure often develops when one component fails or when the components are not operating synchronously. Computational modeling has been useful in developing understanding and generate hypothesis concerning the heart function, diseases and treatments. The recent advancement in HPC and patient specific models also include detail FSI between blood flow and the mechanics of the heart wall, which hence provide more accurate physical mechanisms for cardiac systems.
The heart is a highly complex living structure whose primary function is to cyclically contract in order to generate a pressure gradient to perfuse all body organs including itself. To do so, however, the heart behaves an integrated system where all components of the operation, such as excitation contraction coupling, are tightly orchestrated. Heart failure often develops when one component fails or when the components are not operating synchronously. Computational modeling has been useful in developing understanding and generate hypothesis concerning the heart function, diseases and treatments. The recent advancement in HPC and patient specific models also include detail FSI between blood flow and the mechanics of the heart wall, which hence provide more accurate physical mechanisms for cardiac systems.
* Cryoballoon ablation
Cryoballoon ablation (CBA) is a cryo-energy based minimally invasive treatment procedure for patients suffering
from left atrial (LA) fibrillation. Although this technique has proved to be effective, it is prone to reoccurrences
and some serious thermal complications. We describe the development of a thermal-hemodynamics computational framework to simulate incomplete occlusion
in a patient-specific LA geometry during CBA. The modeling framework uses the finite element method to
predict hemodynamics, thermal distribution, and lesion formation during CBA.
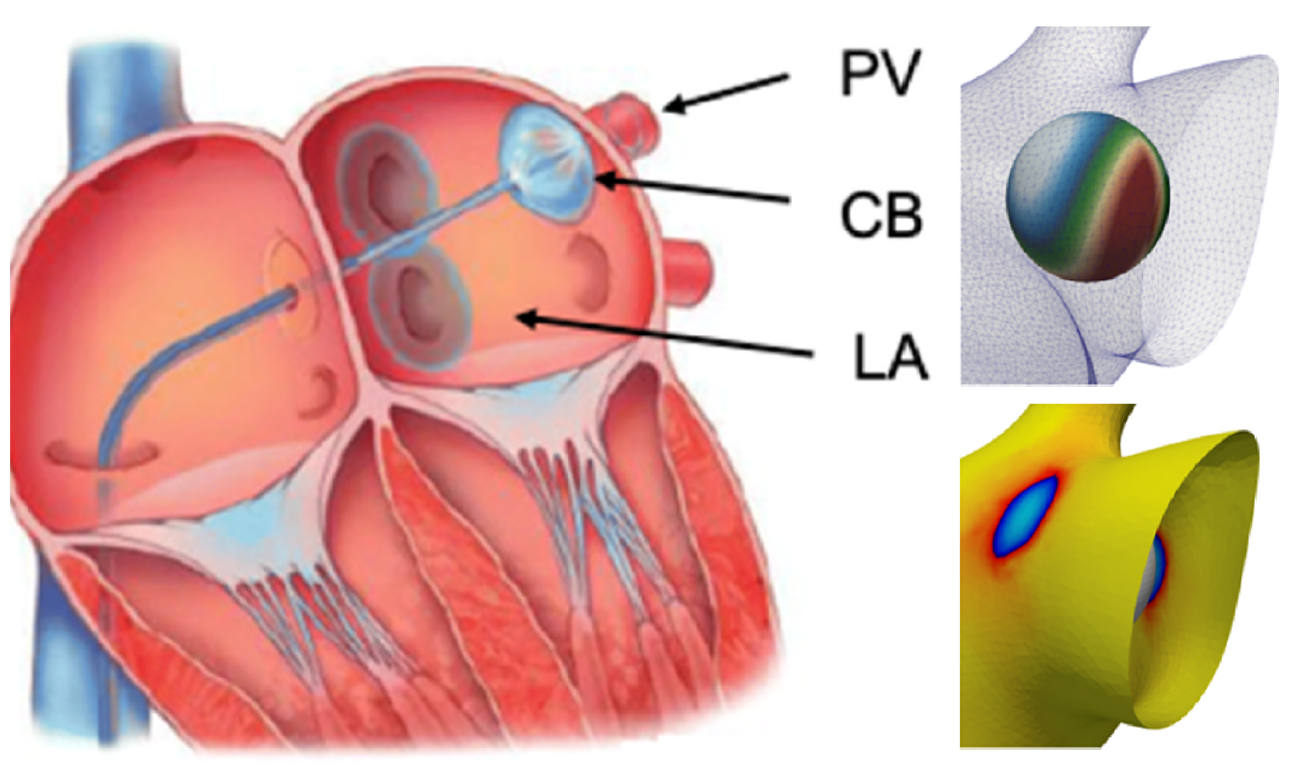
Fig 9: Simulation of CBA in a patient-specific case
( Patel et al. 2023).
( Patel et al. 2023).